
Performance Evaluation of a New Specific Machine for Harvesting Overgrown Brushwood
doi: https://doi.org/10.5552/crojfe.2026.4268
volume: 47, issue: 2
pp: 12
- Author(s):
-
- Bertone Federico
- Manzone Marco
- Article category:
- Original scientific paper
- Keywords:
- roadside vegetation, excavator, logging, productivity, fuel consumption
Abstract
HTML
Efficient roadside vegetation management is essential for reducing infrastructure maintenance costs and enhancing bioenergy recovery. This study evaluates a modified excavator-based feller equipped with a specific arm to extend its operational reach. Field trials were conducted across three distinct site conditions highway embankment, overpass embankment, and riverbank to assess key performance parameters including cycle times (encompassing moving, positioning, felling, processing, and stacking), fuel consumption, and ground pressure. Compared to the conventional configuration, the arm modification yielded a 66% reduction in moving time and a 34% reduction in stacking time, albeit with a 73% increase in positioning time due to the extended reach. Overall, the modified machine demonstrated enhanced operational efficiency, reduced fuel usage by up to 7%, and decreased soil disturbance through a substantial reduction in the tracked surface area. These findings underscore the potential of telescopic boom technology to improve the versatility and sustainability of mechanised roadside biomass harvesting practices.
Performance Evaluation of a New Specific Machine for Harvesting Overgrown Brushwood
Federico Bertone, Marco Manzone
https://doi.org/10.5552/crojfe.2026.4268
Abstract
Efficient roadside vegetation management is essential for reducing infrastructure maintenance costs and enhancing bioenergy recovery. This study evaluates a modified excavator-based feller equipped with a specific arm to extend its operational reach. Field trials were conducted across three distinct site conditions highway embankment, overpass embankment, and riverbank to assess key performance parameters including cycle times (encompassing moving, positioning, felling, processing, and stacking), fuel consumption, and ground pressure. Compared to the conventional configuration, the arm modification yielded a 66% reduction in moving time and a 34% reduction in stacking time, albeit with a 73% increase in positioning time due to the extended reach. Overall, the modified machine demonstrated enhanced operational efficiency, reduced fuel usage by up to 7%, and decreased soil disturbance through a substantial reduction in the tracked surface area. These findings underscore the potential of telescopic boom technology to improve the versatility and sustainability of mechanised roadside biomass harvesting practices.
Keywords: roadside vegetation, excavator, logging, productivity, fuel consumption
1. Introduction
The management of vegetation along roads, agricultural boundaries and power line corridors is essential to ensure the safety of infrastructure and to prevent the uncontrolled growth of tree and shrub species (Ebenhard et al. 2017, Fernandez-Lacruz et al. 2021). Vegetation overgrowth along roads can create a road safety risk, reduce driver visibility, undermine the road surface and lead to increased maintenance costs if left unmanaged (Reja et al. 2024). However, clearing operations often incur significant costs without direct economic returns, as the biomass is usually left to decompose without being utilised (Iwarsson-Wilde 2011, Kiss et al. 2015). In this context, harvesting biomass from overgrown brushwood presents an economically viable opportunity, transforming routine maintenance into a sustainable operation by utilising the harvested biomass for bioenergy production (Fernandez-Lacruz et al. 2021, Laitila and Väätäinen 2021). The vegetation in these areas consists of young trees and shrubs of deciduous and coniferous species (Ebenhard et al. 2017). When left unmanaged, they may exceed the limits of regular road maintenance, necessitating specialised harvesting machinery for small-diameter trees (Laitila and Väätäinen 2021). The density and dimensions of brushwood biomass vary significantly depending on the site, which impacts the efficiency and cost-effectiveness of harvesting operations (Nilsson and Grönlund 2024). Unlike conventional thinning operations, which aim to enhance the growth of high-value timber, integrated brushwood clearing and harvesting remove all vegetation, simplifying the operational process (Petty 2014). Additionally, the absence of residual tree stands facilitates machine movement, thereby increasing harvesting efficiency (Unrau et al. 2018, Laitila and Väätäinen 2020). Moreover, the short forwarding distances characteristic of roadside clearing reduce transportation costs, improving the overall economic feasibility of biomass recovery (Fernandez-Lacruz et al. 2021). Technologies for small-diameter tree harvesting include various cutting head configurations that differ in blade type (disc saws, saw bars, or shear blades) and accumulation capacity (Erber and Kühmaier 2017). These harvesting heads can be mounted on dedicated forestry machines or adapted excavators and tractors, which have a lower purchase cost than specialised forest harvesters and forwarders (Laitila and Väätäinen 2013, Malinen et al. 2016). The use of accumulating felling heads is particularly relevant, as they enable operators to cut and bundle multiple stems in a single movement, thereby enhancing efficiency (Spinelli et al. 2017, Kärhä et al. 2018). However, harvesting costs may still exceed the revenue from biomass extraction, particularly when tree volume is low or when harvesting operations are conducted in small, scattered plots (Petty 2014, Oikari et al. 2010). Beyond economic considerations, utilis ing overgrown brushwood biomass could provide ecological benefits, such as maintaining biodiversity in open and semi-natural habitats, including road verges and power line corridors (Ebenhard et al. 2017). A large number of red-listed species depend on the active management of these landscapes to prevent the encroachment of woody vegetation (Ebenhard et al. 2017). However, the potential impacts on biodiversity require careful assessment, as some forest species associated with early successional stages may be negatively affected by vegetation removal. Balancing the trade-offs between biomass recovery and ecological conservation remains an important aspect of sustainable roadside vegetation management (Ebenhard et al. 2017). Although previous studies have explored the use of accumulating felling heads and forwarders for roadside vegetation management, knowledge regarding mechanised harvesting practices in these contexts remains limited (Iwarsson-Wilde 2011, Laitila and Väätäinen 2020, Fernandez-Lacruz et al. 2021, Laitila and Väätäinen 2021, Nilsson and Grönlund 2024). There is still a need to assess the operational feasibility of different machine configurations under varying site conditions. It was hypothesised that a specific machine configuration may offer greater efficiency in certain contexts, such as roadbanks, compared to conventional configurations. Therefore, this study aims to evaluate the time consumption, productivity, fuel consumption, and ground pressure of a specific machine used for roadside brushwood harvesting, comparing its performance with conventional machine configurations. The findings of this research could contribute to the development of optimised harvesting strategies, improving both efficiency and sustainability in the management of roadside vegetation.
2. Materials and Methods
2.1 Implement Study
The base machine chosen for the purpose of the study was a reduced tail excavator with characteristics in line with the most used excavators in forestry (Bergroth et al. 2006, Bertone and Manzone 2024a). In particular, it was an excavator Komatsu PC 138 US-2 with reduced tail swing radius. The nominal power of the engine was 66 kW and the base machine hydraulic oil flow and pressure were 226 l min-1 and 348 bar, respectively. The excavator was equipped with a mono boom, triple grouser tracks of 50 cm width and blade. The machine was tested with two different configurations. The first configuration was a conventional configuration with a feller head equipped directly on the arm of the excavator with a rotator, the gross mass of the machine was 13,370 kg (Fig. 1). The second configuration involved replacing the excavator boom with a telescopic boom, thus creating a specific machine; the gross mass of the machine, in this specific configuration, was 14,750 kg (Fig. 2).
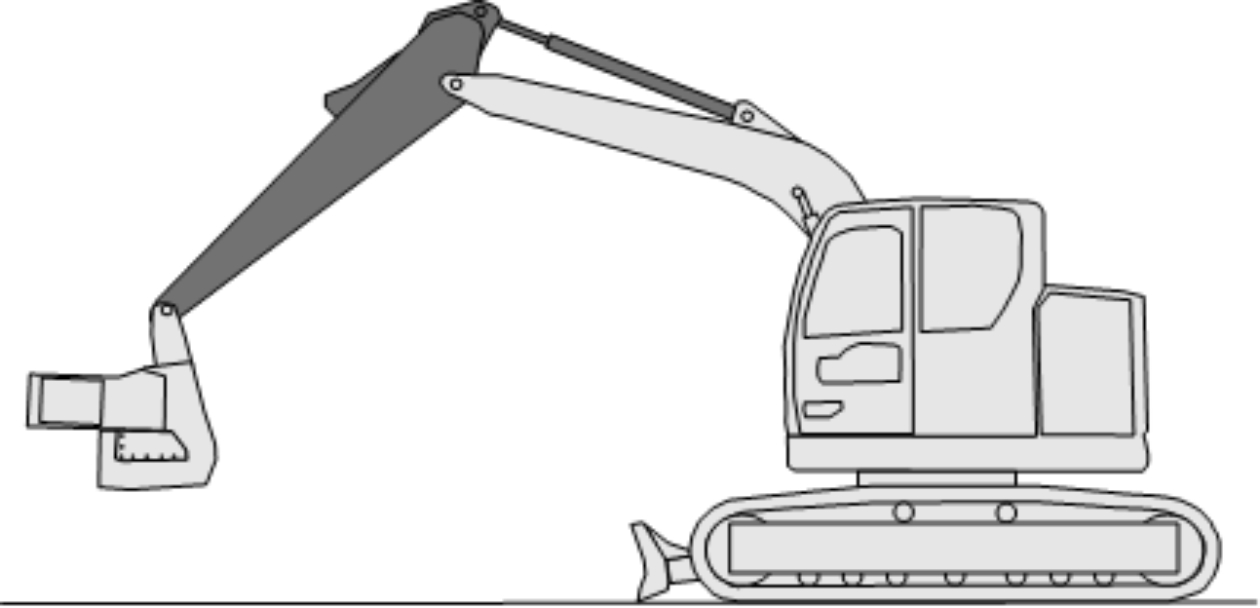
Fig. 1 Conventional configuration of the machine
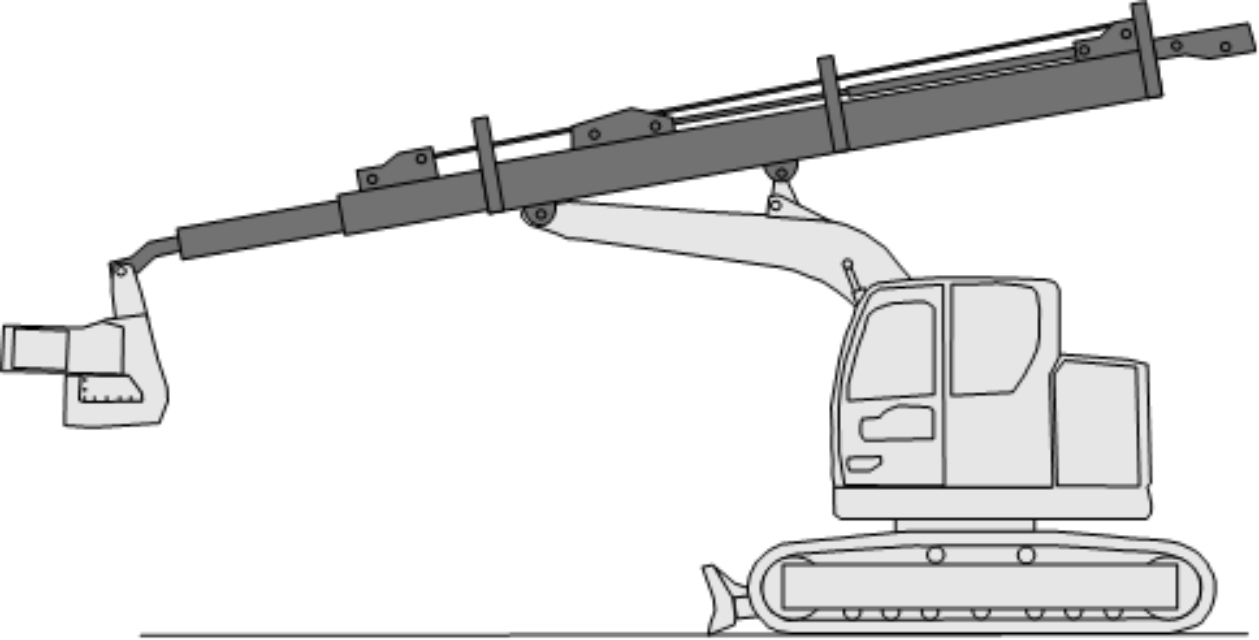
Fig. 2 Specific configuration of the machine
The substitution did not have a negative effect on the stability of the machine. Although the telescopic arm weighed 2200 kg, while the original arm weighed 785 kg, the stability remained unaffected. This is because, during operation, the telescopic arm places most of the weight towards the rear of the machine. The telescopic arm was equipped with a feller head. Its weight is 390 kg and the rotator that links the filler head to the telescopic arm weights 46 kg. The hydraulic oil flow and pressure required are between 80 l min-1 and 100 l min-1 and between 200 bar and 220 bar. The maximum opening capacity is 130 cm, while the cutting capacity is 25 cm. The feller head was equipped with a chainsaw featuring a 0.404” pitch and a 1.6 mm gauge, mounted on a 54 cm bar. Unlike a feller buncher, this feller head did not have accumulation capacity. It could handle only a single felled tree at a time, unless used as a grapple to grab multiple already-felled stems. The maximum reach (distance from the swing centre) of the machine equipped with the telescopic arm is 25 m, since the telescopic arm can reach 20 m. The lifting capacity of the machine at the maximum reach was 2360 kg and 325 kg for conventional and specific configuration, respectively. The operator was skilled and proficient in its work, with 500 h of work per each configuration before the start of the trials. The operators were instructed to work at their normal pace (Spinelli et al. 2019).
2.2 Site and Stand Characteristics
The tests were carried out in October 2024 in three different locations, each characterised by specific slope conditions and locations, in order to evaluate the performance of the two different machine configurations in different environmental contexts. The first site was a coppice forest on a highway embankment with 48% slope. The second was a coppice forest located on the embankment of the highway overpass with a slope of 61%. Both sites were covered with a black locust (Robinia pseudoacacia L.) coppice forest where the average DBH was 13.5 cm and 14.2 cm, and the average height 10.4 m and 11.6 m, respectively, for the first and second site. For the purpose of the study, sites were divided in 4 plots for each machine configuration, and the first plot was used to familiarise with the stand and not used for the repetitions. The plots were rectangular: the first with dimensions 18×50 m and with about 132 trees inside the plot, equalling 1467 trees ha-1; the second with dimensions 13×50 m and 92 trees, equalling 1422 trees ha-1. The forest treatment was a clear-cut. The trees were felled with the feller head and stacked in two piles located at the extreme points of the highest dimension of the plot. The excavator worked parallel to the highest dimension of the plot and for stacking the material, with both configurations, the machine used the maximum reach of the arm equipped on the excavator.
A third coppice forest was chosen on flat terrain (slope <3%) on the riverbank. It was a black locust forest characterised by an average DBH of 19 cm and average height of 15 m. As in the highway embankment, the site was divided in 4 plot for each machine configuration. However, the plots were square (50×50 m) and the number of trees inside the plot was about 383, equalling 1533 trees ha-1. Trees were felled and stacked in piles, arranged to minimise subsequent movement of the woodchipper. The operator had to use the maximum extension of the arm: 7 m and 25 m, respectively.
2.3 Time Consumption and Productivity
The time needed for the conversion was measured both in the company yard and in the work sites directly. The time to fell and stack each plot was determined separately for each plot and work element using a digital stopwatch. In order to avoid any influence on performance, the time was recorded from a panoramic point of view not visible to the excavator operator. Both productive and delay time were recorded (Björheden 1995). Delay time was separated from productive time. The work time was split into 6 time elements (Wang and Haarlaa 2002, Kärhä et al. 2004, Nurminen et al. 2006, Laitila and Väätäinen 2013, Borz et al. 2014, Bertone and Manzone 2024b). In the time study, the following work activities were observed:
- Moving: begins when the excavator starts to move and ends when the excavator stops moving to perform some other activity
- Positioning: begins when the upper structure starts to swing and ends when the swing stops moving to perform some other activity. For example: swing towards a tree that ends when the feller head is resting on a tree and the felling cut begins
- Felling: begins when the felling cut starts and ends when the tree is on the ground
- Processing (cross-cutting, bunching): begins when the tree is on the ground and ends when the last log is cross-cut and dropped onto the pile. Bunching is defined as arranging logs into small piles
- Stacking: moving logs, tops and branches to the edge of the plot and bunching the biomass (outside the processing phase)
- Delays: time that is not related to effective work, e.g. repairing and maintenance, phone calls, etc.
Productivity was calculated with an analytical method considering the amount of time to complete a plot and the amount of biomass felled and stacked in each plot. For this purpose, the biomass of each plot was chipped end weighed using portable wheel load scale (HAENNI WL 108) since the material size was too variable to allow an accurate calculation of the volume (Magagnotti et al. 2012). The weight of the vehicles used for the woodchip transport was carried out on flat, concrete surfaces; the productivity was calculated by weighing separately the weight and combining it with the time required to stack the material. To avoid influencing the tests, the same chipper was used for all the replications. The working rate was expressed in terms of mass (t h-1) (Manzone and Balsari 2015). The mass of chipped material resulting from each plot combined with the time consumption (felling and stacking) of each plot was useful for measuring productivity.
2.4 Fuel Consumption
Fuel consumption was determined using a »topping-off system«. In this method, the fuel consumption was determined by refilling the machine before and after each plot. The fuel necessary to fill the tank was assumed to have been consumed in the time between the refills (Borz et al. 2021). Fuel consumption was expressed in litres per unit of work hour (Manzone 2018). A glass pipe with a measurement accuracy of 0.02 l was used to refill the tank (Manzone 2015). To be more accurate, an inclinometer was placed on the frame of the machine so that the inclination was ±2°, both longitudinally and transversely, and the difference was not significant with a tank pipe diameter of 7.50 cm. Moreover, the tank was filled to a specific point in the tank pipe (±2 mm), marked with a specific marker, thus to avoid fuel leaks when inserting the cap and during the machine movements. The fuel consumption was expressed per unit of time (l h-1) and per unit of mass produced (l t-1) (Bertone and Manzone 2024b).
2.5 Ground Pressure
The distance between the idle roller and drive roller centres has been used to compute the theoretical footprint on the ground because the machine layout has changed. It is challenging to calculate the real footprint as it depends on the ground bearing capacity. The track shoe position shifts from horizontal at the centre of the front idle and the centre of the final drive (Bertone and Manzone 2024a).
To calculate the ground pressure of the excavators, the following parameters were used: centre distance between the idle roller and drive roller (288 cm), track shoe width (50 cm) and gross mass of each configuration of the machine in the following formula (Eq. 1):

A GNSS receiver was used to record the position of the machines in the plots. The recording of the position took place every 2 seconds. The recorded points were useful for creating a path in QGis 3.34 environment. The theoretical surface area is calculated by multiplying the length of the path and the width of the crawlers.
2.6 Data Analysis
The lengths of the track were obtained with the calculator in the free and open-source software QGis (version 3.34). Microsoft Excel software and RStudio (R version 4.4.1) (Team 2013) were used for statistical purposes. Shapiro-Wilk’s and Levene’s tests were applied to inspect normality and homoscedasticity of the data using »emmeans« and »car« packages, respectively (Fox et al. 2012, Lenth 2022).
One-way ANOVA was used to test differences in mean values between groups (threshold for statistical significance set at 0.05) (Wickens and Keppel 2004) using »emmeans« package (Lenth 2022). For post-hoc comparison, the Tukey-HSD test was applied (Tukey 1949) using »agricolae« package (de Mendiburu and de Mendiburu 2019).
3. Results
3.1 Time Consumption and Productivity
The time required to change from the conventional to the specific configuration ranged from 0.76 h to 1.03 h, independently of location.
Working on highway embankment (first site), the machine in conventional configuration cannot reach the central part of the plot. In addition, this machine needs to move parallel to the plot, in both sides, in order to perform the felling of most of the trees. However, it reaches a maximum distance of 7 m, therefore not working on 25% of the plot area (Figs. 3–5).
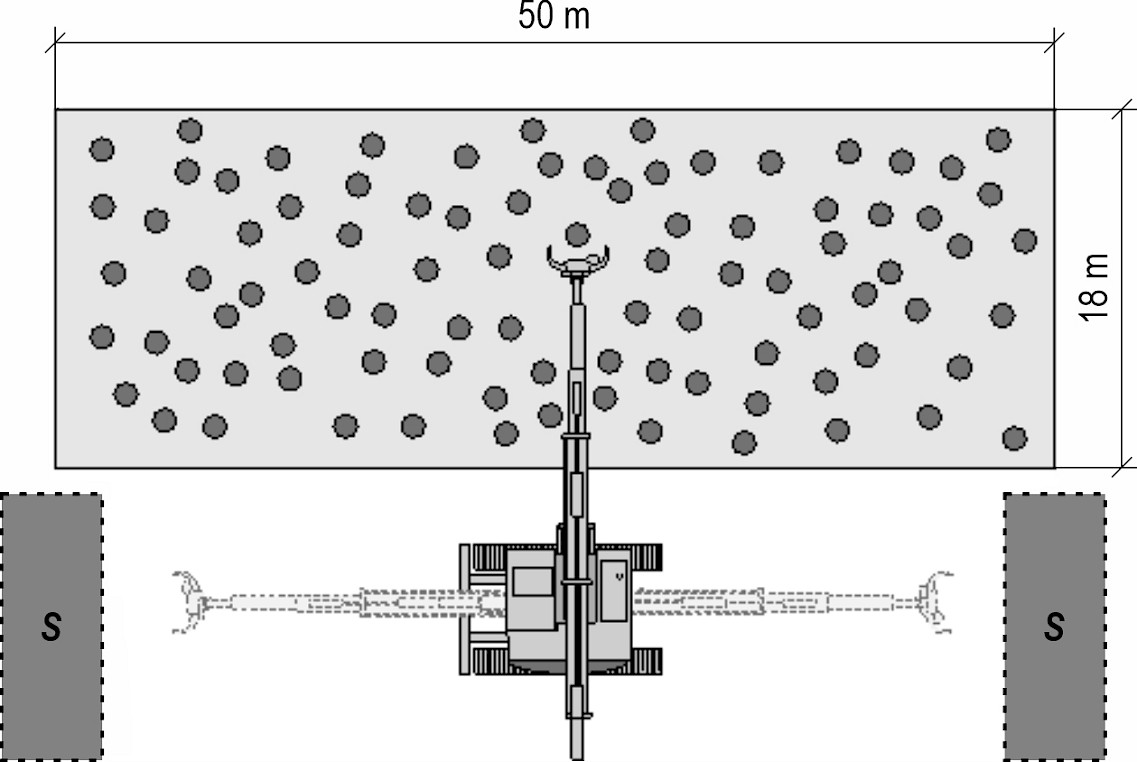
Fig. 3 Graphic representation of the specific machine in highway embankment (s =s tack)
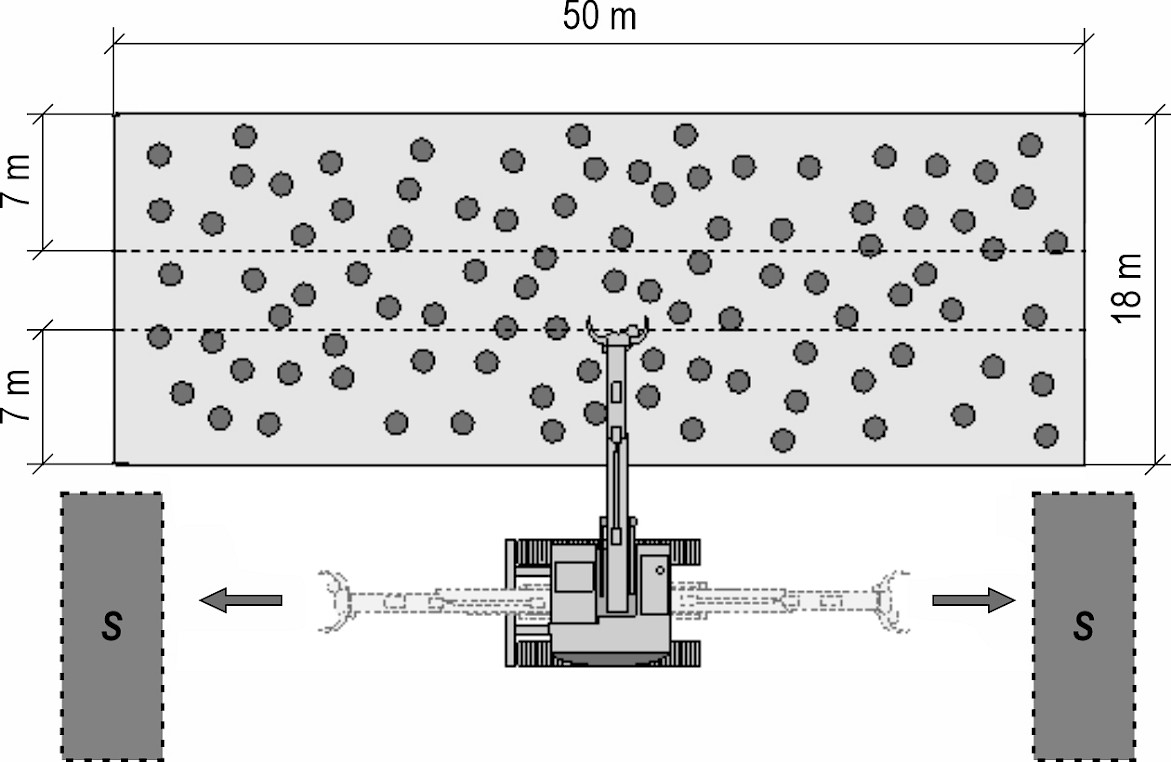
Fig. 4 Graphic representation of the conventional machine configuration in highway embankment (s = stack)

Fig. 5 Specific machine at work in highway embankment
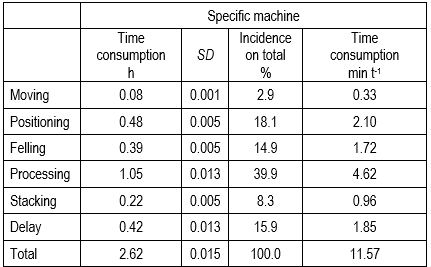
The average time consumption to complete the plot obtained by the specific machine was 2.62 h. The highest incidence on total time is about processing (39.9%) (Table 1).
Table 1 Time consumption obtained by the specific machine working on highway embankment
While working in the second site (overpass embankment), both configurations of the machines can fell all the trees in the plots. However, as in the first plot, the machine in conventional configuration needs to move parallel to the plot, in both sides, in order to perform the felling of all the trees (Fig. 6, Fig. 7).
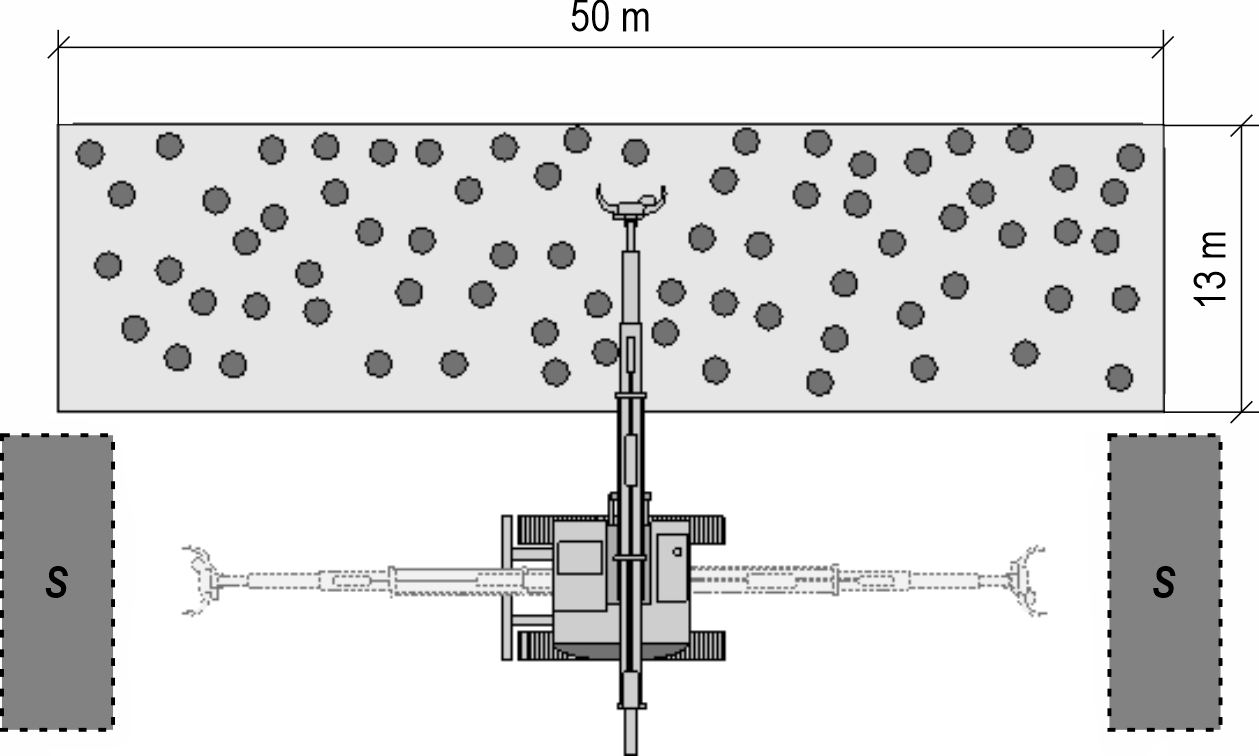
Fig. 6 Graphic representation of the specific machine configuration in overpass embankment (s = stack)
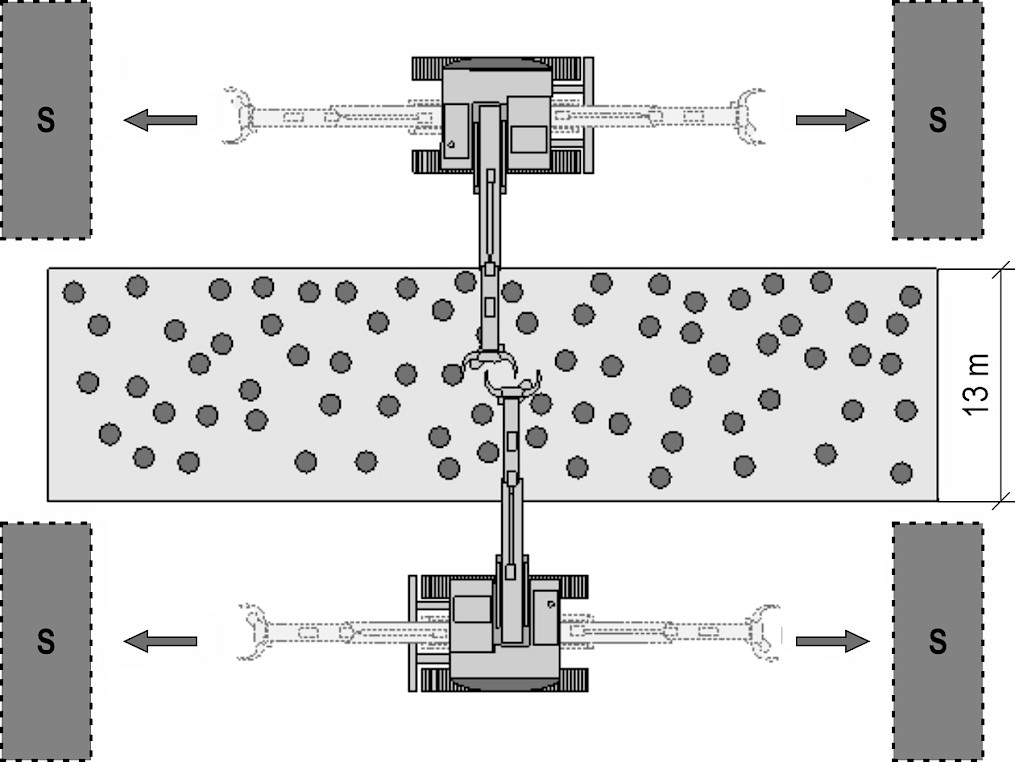
Fig. 7 Graphic representation of the conventional machine configuration in overpass embankment (s = stack)
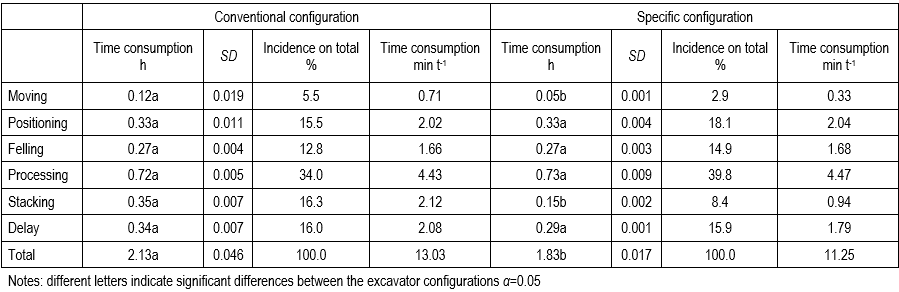
The average time consumption to complete the plot obtained by the specific machine was 1.83 h, while the machine in conventional configuration spent 2.13 h. The highest incidence on total time is about processing for both machines: 34.0% and 39.8% for the conventional configuration and specific configuration, respectively. The greatest differences in time consumption between the machines were related to moving and stacking (Table 2).
Table 2 Time consumption obtained by the machine in conventional and specific configuration in overpass embankment
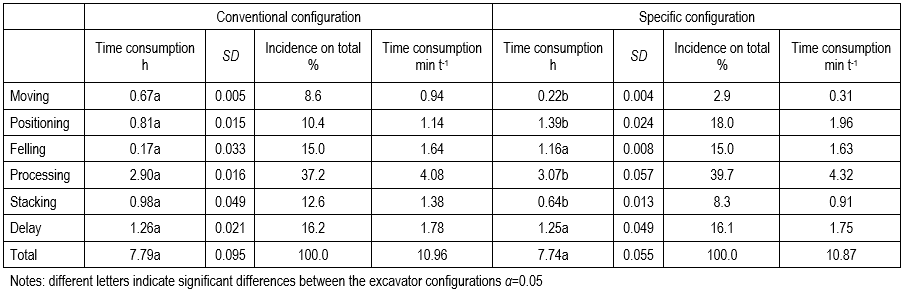
The average time in riverbank for a cycle including delays, were 2.79 h and 2.74 h for the conventional machine and specific machine, respectively. For both configurations of the machines, the work activity that required more time on total is processing: 37.2% and 39.7%, respectively, for conventional and specific machine. The main differences between the machine configurations in terms of incidence of the work activities were in moving, positioning and stacking. In particular, the values were 8.6%, 10.4% and 12.6% for the conventional configuration. While for the second configuration the values were 2.9%, 18.0% and 8.3% (Table 3).
Table 3 Time consumption obtained by the specific machine working on riverbank
Comparing the time consumption obtained, without taking delays into account, it can be shown that for both machine configurations, processing is the most time-consuming phase, independently of the working site. However, the differences between two different machine configurations regarding moving and stacking are statistically significant (Fig. 8).
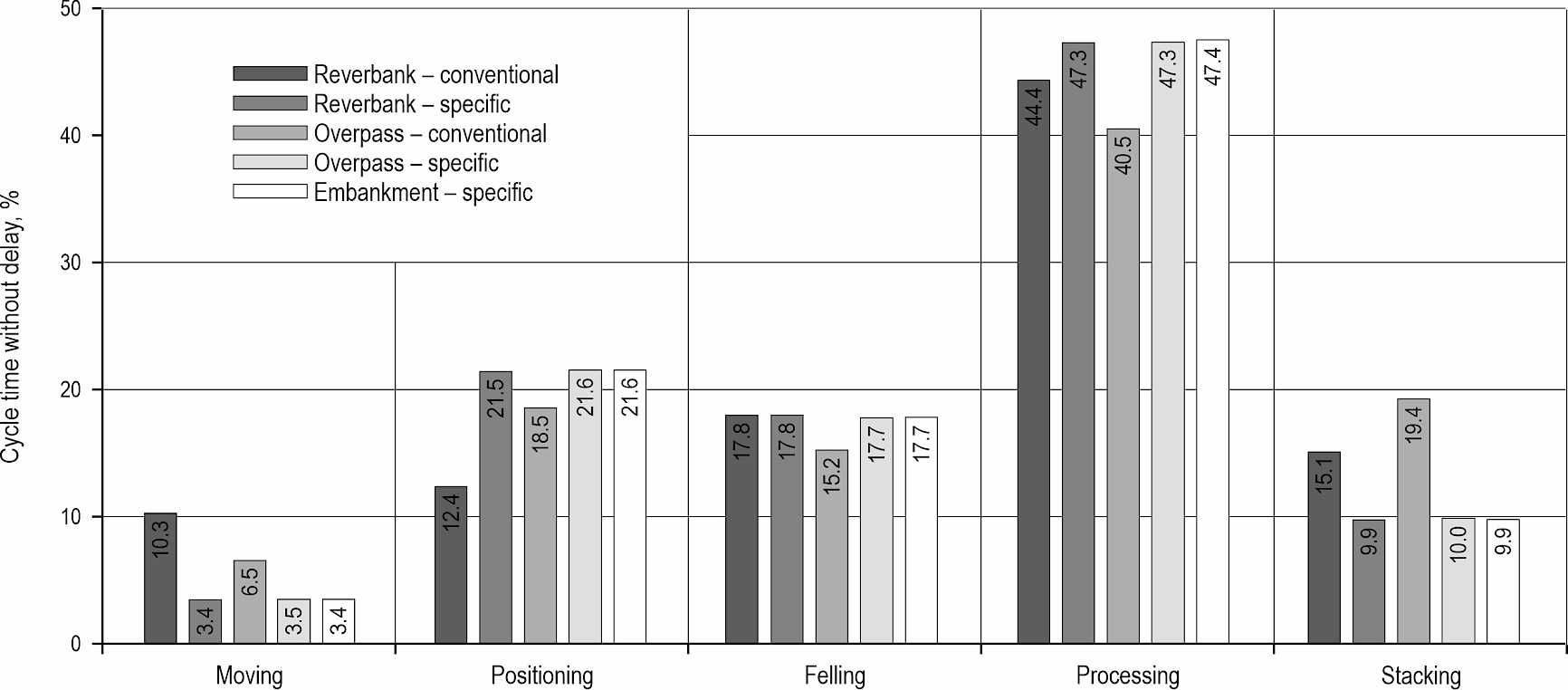
Fig. 8 Time consumption of the machine in conventional and specific configuration in different worksites
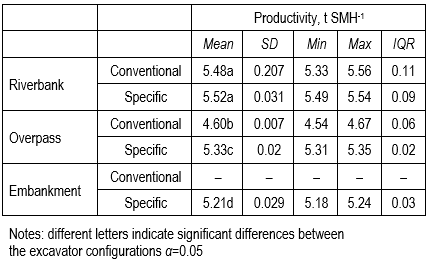
The productivity achieved by both configurations in the riverbank did not show statistically significant differences. However, in overpass embankment, the machine with specific design achieved higher productivity than the conventional configuration. Namely, in the overpass, the machine with a conventional set up obtained a productivity equal to 5.48 t PMH-1 (4.60 t SMH-1), while the specific machine obtained 6.34 t PMH-1 (5.33 t SMH-1) (Table 4, Table 5).
Table 4 Net productivity obtained by the machine in specific and conventional configuration
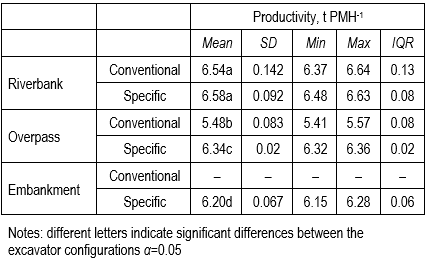
Table 5 Gross productivity obtained by the machine in specific and conventional configuration
3.2 Fuel Consumption
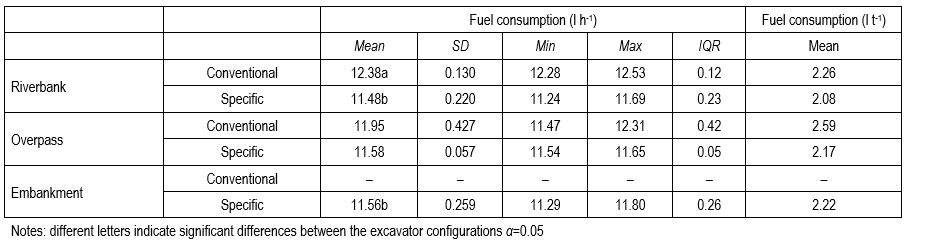
Fuel consumption in the riverbank was 12.38 l h-1 and 11.48 l h-1, obtained by the machine in conventional configuration and specific configuration, respectively. In overpass embankment, it was 11.58 l h-1 and 11.95 l h-1 obtained by the machine in specific configuration and conventional configuration, respectively. In highway embankment, with the specific machine, an average fuel consumption of 11.56 l h-1 was recorded (Table 6).
Table 6 Fuel consumption of the machine in specific and conventional configuration
3.3 Ground Pressure
Ground pressure for the machine in conventional configuration was 0.42 kg cm-2 equal to 41.2 kPa. While the machine equipped with telescopic arm had a ground pressure of 0.51 kg cm-2 equal to 50.0 kPa. Analysing the length of the path due to the operational phases, the average length recorded by the machines in conventional configuration was 274.2 m, while it was 96.3 m for the machine equipped with telescopic arm (Fig. 7). Moreover, there were four stacks for the first machine, and only two for the second configuration.
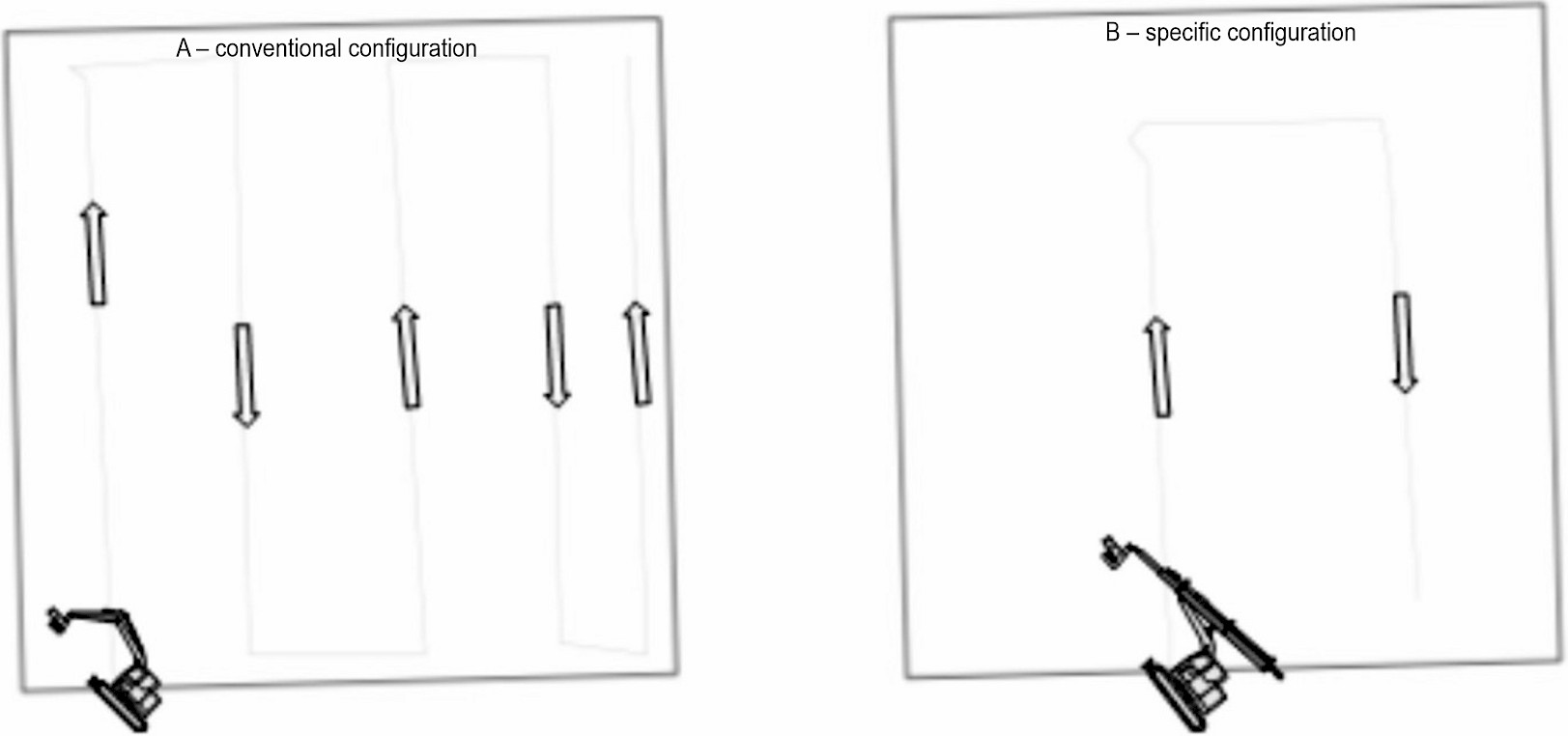
Fig. 9 Graphic representation of the track of machines in riverbank sites
4. Discussion
This study compared a conventional configuration of an excavator-based feller with a specific configuration of the same machine. The selection of the machine was based on existing literature, specifically choosing an excavator with a reduced tail swing radius and a gross mass between 13 t and 16 t (Bergroth et al. 2006). Moreover, the machine chosen was equipped with tracks, because this kind of machines are very stable and exert low pressure on the soil (Väätäinen et al. 2004; Kormanek and Dvořák 2021).
The reduced time required to convert the machine from conventional to specific configuration allows for easy modifications even in the workplace, significantly increasing its versatility. The machine can operate in a conventional configuration, also using the bucket, and, when necessary, the stick can be replaced with a telescopic arm. Moreover, during the transportation phases of the excavator on a low loader, the telescopic arm can be stored beneath the excavator chassis.
The experimental comparisons of the two machine configurations shows that they are very similar in terms of amount of time to complete a plot on the riverbank. However, analysing specific productive time elements, it is possible to highlight important differences in three out of five of them. Using the machine equipped with telescopic arm (specific configuration) instead of the conventional configuration, the time required for moving and stacking was reduced by 66% and 34%, respectively. On the contrary, the time required for positioning increased by approximately 73% with the specific configuration.
The reductions in moving and stacking result from the ability to cover a large distance using only the machine arm without moving its tracks. However, the reduction in the stacking time is more limited, as the increased distance made it more difficult for the operator to create an orderly pile. For the same reason, the time required for the positioning phase increases. Specifically, due to the greater distance, the operator takes longer to place the feller head in the correct position. This issue can be reduced by installing a camera on the arm. Additionally, the presence of leaves on the trees and shrubs can reduce the operator’s visibility, making it more difficult to identify the correct felling point.
The increase in the moving and stacking phase recorded for conventional configuration results in an increase in possible damage to the ground, as it increases the total surface area trampled during work and increases the time the machine needs to pass through a single point. On the highway embankment, with the specific configuration of the machines, the time consumption recorded is very similar to the time consumption recorded on the riverbank plot. This result is due to the possibility of the machines to work in the same way adopted in the riverbank, but also to the fact that it is unaffected by the slope of the embankment. On the contrary, the machine in conventional configuration cannot reach the central part of the plot and it needs to work upstream and downstream of the slope to harvest as many trees. In overpass embankment, the difference in time consumption is relevant with a reduction of 14% when using the specific machine. The difference is due to the movement of the machine; in fact, in order to reach the work point and the stacks, the machine with conventional configuration, with an arm length of 7 m, needs to move with its tracks. Moreover, the machine in conventional configuration needs to move on both sides of the overpass embankment: crest and landward toe. In highway embankments and in overpass embankment, relocating the machine often requires transportation using a low loader. Due to the limited number of highway entry and exit points, transferring the machine from one side of the embankment to the other can require several kilometers of travel. This not only increases transport time and operating costs, but also creates potential traffic disruptions due to the presence of the machine on the roadway. The specific configuration eliminates many of these inefficiencies, as the extended reach of the telescopic arm allows the machine to remain in position while covering a wider work area, reducing unnecessary relocations and improving overall efficiency.
The machine productivity recorded in both configurations (conventional and specific) revealed no statistically significant differences between the two configurations when operating on the riverbank. However, in the overpass embankment scenario, the difference was more pronounced. Additionally, no significant variations were found when comparing the specific machine across the three different contexts. The productivity is in line with a model of productivity for harvesting in coppice in Italy (Spinelli et al. 2010). However, the productivity is about 50% lower than that achieved by excavators in conventional configuration that harvest a short rotation poplar plantation. The choice of cutting device plays a critical role in machine performance. A feller head with greater cutting capacity and accumulation ability can enhance productivity but also increases the overall weight of the equipment (Laitila and Väätäinen 2021). While this can be a valuable option for the conventional configuration, it poses challenges for the specific configuration, as the added weight may prevent full extension of the arm.
Fuel consumption was reduced by 4% and 7% with the specific configuration on the overpass embankment and riverbank, respectively. Despite the increased gross mass of the modified machine, the conventional configuration required frequent track movements between stacks and felling positions, leading to higher fuel consumption. The average fuel consumption recorded is in line with those obtained by an excavator equipped with a specific head to harvest overgrowth brushwood from roadside (Laitila and Väätäinen 2021).
Replacing the excavator standard arm with a telescopic arm increased the machine gross mass, which consequently raised ground pressure by approximately 21%. To mitigate this, wider track shoes (0.60 m instead of the standard 0.50 m) would be required. The theoretical ground pressure with this adjustment would be 0.43 kg cm2 (42.17 kPa). The great distance reachable also corresponds to a reduction of 65% of the surface tracked. This also involves a reduction of the number of stacks. In fact, the stacks were reduced from four to two and consequently the soil compaction was reduced due to the chipper work.
Beyond its advantages in traditional harvesting operations, the specific configuration also improves machine versatility, making it suitable for additional applications such as removing logs accumulated against bridges (Fig. 10).

Fig. 10 Removal of logs near a bridge
The extended reach allows the machine to operate both from riverbanks and directly on bridges, lifting material efficiently. This adaptability makes it a more practical choice compared to highly specialised machinery, as it can be reconfigured based on operational needs, optimizing both cost-effectiveness and usability across different forestry and infrastructure maintenance tasks.
5. Conclusions
This study compared the performance of an excavator-based feller in conventional and specific configurations (with a telescopic boom) for coppice harvesting. Cycle times and productivity were comparable between the two configurations; however, the specific configuration demonstrated several distinct advantages. The extended reach of the telescopic arm reduced moving and stacking times by 66% and 34%, respectively. Although positioning time increased by 73% due to the need for greater precision at longer distances, the overall operational efficiency improved. Furthermore, the specific configuration minimises the need for frequent machine relocations. This is particularly beneficial on highway embankments, where limited access points often require several kilometers of travel via low loaders, increasing downtime, operating costs, and potential traffic disruptions. Reduced track movement also resulted in lower fuel consumption (by 4–7%) and decreased soil disturbance, as evidenced by a 65% reduction in the tracked surface area and fewer stacking operations, which in turn reduces soil compaction. In addition to these efficiency gains, the specific configuration enhances versatility by enabling the machine to access previously unreachable areas. This adaptability makes it a more practical choice compared to highly specialised machinery, as it can be reconfigured to meet diverse operational needs in both forestry and infrastructure maintenance.
6. References
Bergroth, J., Palander, T., Kärhä, K., 2006: Excavator-based harvesters in wood cutting operations in Finland. Forestry Studies 45: 74–88.
Bertone, F., Manzone, M., 2024a: Performance of tracked excavators equipped with grapple-saw stacking treetops in poplar plantations. Int J For Eng 35(2): 189–197. https://doi.org/10.1080/14942119.2024.2307257
Bertone, F., Manzone, M., 2024b: Productivity and costs of a tracked excavator-based processor at the cable yarder landing in the North-western Italian Alps. Int J For Eng 36(1): 67–75. https://doi.org/10.1080/14942119.2024.2423109
Björheden, R. 1995: Forest work study nomenclature. Swedish University of Agricultural Science, Dept. of Operational Efficiency.
Borz, S.A., Bîrda, M., Ignea, G., Popa, B., Câmpu, V.R., Iordache, E., Derczeni, R.Al., 2014: Efficiency of a Woody 60 processor attached to a Mounty 4100 tower yarder when processing coniferous timber from thinning operations. Ann For Res 57(2): 333–345. https://doi.org/10.15287/afr.2014.258
Borz, S.A., Marcu, M.V., Cataldo, M.F., 2021: Evaluation of an hsm 208f 14tone hvt-r2 forwarder prototype under conditions of steep-terrain low-access forests. Croat J For Eng 42(2): 185–200. https://doi.org/10.5552/crojfe.2021.775
Ebenhard, T., Forsberg, M., Lind, T., Nilsson, D., Andersson, R., Emanuelsson, U., Eriksson, L., Hultåker, O., Iwarsson Wide, M., Ståhl, G., 2017: Environmental effects of brushwood harvesting for bioenergy. For Ecol Manage 383: 85–98. https://doi.org/10.1016/j.foreco.2016.05.022
Erber, G., Kühmaier, M., 2017: Research trends in European forest fuel supply chains: a review of the last ten years (2007–2017) – Part one: harvesting and storage. Croat J For Eng 38(2): 269–278.
Fernandez-Lacruz, R., Edlund, M., Bergström, D., Lindroos, O., 2021: Productivity and profitability of harvesting overgrown roadside verges–a Swedish case study. Int J For Eng 32(1): 19–28. https://doi.org/10.1080/14942119.2020.1822664
Fox, J., Weisberg, S., Adler, D., Bates, D., Baud-Bovy, G., Ellison, S., Firth, D., Friendly, M., Gorjanc, G., Graves, S., 2012: Package »car.« Vienna: R Foundation for Statistical Computing 16(332): 333.
Iwarsson-Wilde, M., 2011: Forest fuel harvest from roadsides. In: Thorsén, Å., Björheden, R., Eliasson, L., editors. Efficient forest fuel supply systems Composite report from a four-year R&D programme 2007–2010. Uppsala: Skogforsk, 65–67 p.
Kärhä, K., Poikela, A., Palander, T., 2018: Productivity and costs of harwarder systems in industrial roundwood thinnings. Croat J For Eng 39(1): 23–33.
Kärhä, K., Rönkkö, E., Gumse, S-I., 2004: Productivity and Cutting Costs of Thinning Harvesters. Int J For Eng 15(2): 43–56. https://doi.org/10.1080/14942119.2004.10702496
Kiss, K., Malinen, J., Tokola, T., 2015: Forest road quality control using ALS data. Can J For Res 45(11): 1636–1642. https://doi.org/10.1139/cjfr-2015-0067
Kormanek, M., Dvořák, J., 2021: Ground pressure changes caused by mht 8002hv crawler harvester chassis. Croat J For Eng 42(2): 201–211. https://doi.org/10.5552/crojfe.2021.844
Laitila, J., Väätäinen, K., 2013: The cutting productivity of the excavator-based harvester in integrated harvesting of pulpwood and energy wood. Balt For 19(2): 289–300.
Laitila, J., Väätäinen, K., 2020: Productivity of harvesting and clearing of brushwood alongside forest roads. Silva Fenn 54(5): 1–21. https://doi.org/10.14214/sf.10379
Laitila, J., Väätäinen, K., 2021: Productivity and cost of harvesting overgrowth brushwood from roadsides and field edges. Int J For Eng 32(2): 140–154. https://doi.org/10.1080/14942119.2021.1903790
Lenth, R., 2022: emmeans: Estimated marginal means, aka least-squares means. R package version 1.7. 2.
Magagnotti, N., Spinelli, R., Acuna, M., Bigot, M., Guerra, S., Hartsough, B., Kanzian, C., Kärhä, K., Lindroos, O., Roux, S., 2012: Good practice guidelines for biomass production studies, COST Action FP-0902, WG 2 Operations research and measurement methodologies. Sesto Fiorentino, Italy: CNR IVALSA.
Malinen, J., Laitila, J., Väätäinen, K., Viitamäki, K., 2016: Variation in age, annual usage and resale price of cut-to-length machinery in different regions of Europe. Int J For Eng 27(2): 95–102. https://doi.org/10.1080/14942119.2016.1171964
Manzone, M., 2015: Energy consumption and CO2 analysis of different types of chippers used in wood biomass plantations. Appl Energy 156: 686–692. https://doi.org/10.1016/j.apenergy.2015.07.049
Manzone, M., 2018: CO2 emissions and energy consumption of loaders in woodchip loading operation. Biomass Bioenergy 109: 10–15. https://doi.org/10.1016/j.biombioe.2017.12.012
Manzone, M., Balsari, P., 2015: Productivity and woodchip quality of different chippers during poplar plantation harvesting. Biomass Bioenergy 83: 278–283. https://doi.org/10.1016/j.biombioe.2015.10.010
de Mendiburu, F., de Mendiburu, M.F., 2019: Package »agricolae.« R Package, version. 1(3): 1143–1149.
Nilsson, D., Grönlund, Ö., 2024: Productivity and cost of harvesting roadside brushwood and small trees in Sweden: a simulation study. Int J For Eng 35(3): 456–469. https://doi.org/10.1080/14942119.2024.2336686
Nurminen, T., Korpunen, H., Uusitalo, J., 2006: Time consumption analysis of the mechanized cut-to-length harvesting system. Silva Fenn 40(2): 335–363. https://doi.org/https://doi.org/10.14214/sf.10379
Oikari, M., Kärhä, K., Palander, T., Pajuoja, H., Ovaskainen, H., 2010: Analyzing the Views of Wood Harvesting Professionals Related to the Approaches for Increasing the Cost-Efficiency of Wood Harvesting from Young Stands. Silva Fenn 44(3): 481–495. https://doi.org/https://doi.org/10.14214/sf.144
Petty, A., 2014: Opportunities for cost mitigation and efficiency improvements through rationalization of small-diameter energy wood supply chains. Diss For 175: 47 p. https://doi.org/10.14214/df.175
Reja, V.K., Davletshina, D., Yin, M., Wei, R., Adam, Q.F., Brilakis, I., Perrotta, F., 2024: A Digital Twin Based Approach to Control Overgrowth of Roadside Vegetation. In: ISARC Proceedings of the International Symposium on Automation and Robotics in Construction. Vol. 41. Lille, France: IAARC Publications, 661–668 p.
Spinelli, R., Hartsough, B.R., Magagnotti, N., 2010: Productivity Standards for Harvesters and Processors in Italy. For Prod J 60(3): 226–235. https://doi.org/10.13073/0015-7473-60.3.226
Spinelli, R., Lombardini, C., Marchi, E., Aminti, G., 2019: A low-investment technology for the simplified processing of energy wood from coppice forests. Eur J For Res 138(1): 31–41. https://doi.org/10.1007/s10342-018-1150-z
Spinelli, R., Magagnotti, N., Schweier, J., 2017: Trends and Perspectives in Coppice Harvesting. Croat J For Eng 38(2): 219–230.
Team, R.C., 2013: R: A language and environment for statistical computing. Foundation for Statistical Computing, Vienna, Austria.
Tukey, J.W., 1949: Comparing individual means in the analysis of variance. Biometrics 5(2): 99–114. https://doi.org/https://doi.org/10.2307/3001913
Unrau, A., Becker, G., Spinelli R., Lazdina, D., Magagnotti, N., Nicolescu, V-N., Buckley, P., Bartlett D., Kofman, P.D., 2018: Coppice forests in Europe. Albert Ludwig University Freiburg.
Väätäinen, K., Sikanen, L., Asikainen, A., 2004: Feasibility of Excavator-Based Harvester in Thinnings of Peatland Forests. Int J For Eng 15(2): 103–111. https://doi.org/10.1080/14942119.2004.10702502
Wang, J., Haarlaa, R., 2002: Production analysis of an excavator-based harvester: a case study in Finnish forest operations. For Prod J 52(3): 85–90.
Wickens, T.D., Keppel, G., 2004: Design and analysis: A researcher’s handbook. Pearson Prentice-Hall Upper Saddle River, NJ.
© 2026 by the authors. Submitted for possible open access publication under the
terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Authors’ addresses:
Federico Bertone, MSc *
e-mail: federico.bertone@unito.it
Assoc. prof. Marco Manzone, PhD
e-mail: marco.manzone@unito.it
Department of Agricultural, Forest and Food Sciences
University of Turin
Largo P. Braccini 2
10095 Grugliasco, Turin
ITALY
* Corresponding author
Received: March 26, 2025
Accepted: July 26, 2025
Original scientific paper